
TL;DR:
- La qualità dell’ortofoto dipende da strumenti, metodi e controllo accurato dei punti di riferimento.
- Per rilievi survey-grade si raggiungono precisioni di 2-5 cm con sistemi RTK e GCP di qualità.
- Errori comuni includono sovrapposizioni insufficienti, GCP mal posizionati e condizioni ambientali sfavorevoli.
Un’ortofoto imprecisa non è solo un problema estetico: può generare errori di progetto, ridisegni costosi e contenziosi in cantiere. Per ingegneri, geometri e agronomi che gestiscono rilievi complessi, la qualità del dato fotogrammetrico è il fondamento su cui si costruisce ogni decisione tecnica successiva. Questa guida percorre l’intero processo, dalla scelta della strumentazione alla verifica finale del prodotto, con dati reali e indicazioni operative concrete per chi vuole risultati affidabili fin dal primo volo.
Indice
- Requisiti e strumenti essenziali per generare ortofoto con droni
- Procedura dettagliata: passo dopo passo nella creazione dell’ortofoto
- Errori comuni e come evitarli nella fotogrammetria da drone
- Come valutare la qualità dell’ortofoto finale
- La prospettiva dell’esperto: ortofoto e oltre
- Vuoi ortofoto professionali senza margine d’errore?
- Domande frequenti sulla procedura di creazione ortofoto con droni
Punti Chiave
| Punto | Dettagli |
|---|---|
| Checklist strumenti | Partire sempre da una selezione ragionata di droni, sensori e software per evitare errori in fase operativa. |
| Fasi operative chiare | Segui una procedura passo-passo: pianificazione, acquisizione, post-processing e verifica sono essenziali. |
| Prevenire errori | Gestire bene GCP e sequenza di scatti evita rilievi ripetuti e costosi. |
| Controllo qualità dati | Valuta ogni ortofoto su parametri oggettivi come RMSE e densità punti per lavorare con standard professionali. |
Requisiti e strumenti essenziali per generare ortofoto con droni
Chiariti obiettivi e rischi, presentiamo cosa serve davvero per una procedura professionale. Non basta avere un drone in tasca: ogni componente della catena, dal sensore al software, influisce direttamente sulla qualità del prodotto finale.
Droni e sensori
Per rilievi topografici che richiedano standard survey-grade, i sistemi più indicati sono quelli dotati di GPS/GNSS RTK (Real Time Kinematic) integrato o compatibili con sistemi PPK (Post Processing Kinematic). Il DJI Matrice 300 RTK, ad esempio, abbinato a GCP (Ground Control Points) rilevati con strumentazione GNSS NRTK, permette di raggiungere accuratezze empiriche di 2-5 cm su rilievi di area vasta, come dimostrato da operazioni reali su zone costiere di 17 ettari con RMSE intorno a 4 cm. Anche rilievi di argini del Po su percorsi di 4 km con Matrice 4E RTK hanno confermato precision survey-grade con configurazione GCP corretta. I vantaggi dei rilievi RTK si traducono direttamente in risparmio di tempo e maggiore affidabilità dei dati consegnati.
Software di pianificazione e fotogrammetria
Il software è il secondo pilastro. Per la pianificazione del volo servono strumenti che consentano di impostare quota, sovrapposizione frontale e laterale, velocità e modalità di acquisizione. Applicazioni come DJI Pilot 2, Mission Planner o Litchi offrono funzionalità adeguate per missioni professionali. Per la fase di elaborazione fotogrammetrica, i software più diffusi in ambito tecnico sono Agisoft Metashape, Pix4Dmapper e RealityCapture. Ciascuno ha caratteristiche specifiche in termini di velocità di elaborazione, qualità delle nuvole di punti e integrazione con ambienti CAD, GIS e BIM.
GCP: che cosa sono e perché sono fondamentali
I GCP sono punti di controllo a terra con coordinate note, rilevati con precisione centimetrica tramite strumentazione GNSS. Vengono posizionati prima del volo su target visibili nelle immagini e poi utilizzati nel software di fotogrammetria per georeferenziare il modello. Senza GCP di qualità, anche il miglior drone RTK può produrre ortofoto con errori sistematici di diversi centimetri. La distribuzione spaziale è critica: punti concentrati in una sola zona dell’area non bilanciano il modello. I requisiti professionali per ortofoto prevedono sempre una verifica post-elaborazione attraverso checkpoint indipendenti.

Condizioni ambientali e vincoli normativi
Luce diffusa e cielo coperto uniformemente sono preferibili alla luce diretta del mezzogiorno, che crea ombre marcate e riduce la qualità delle immagini. Il vento deve essere entro i limiti operativi del drone. Sul fronte normativo, in Italia le operazioni UAV sono regolate dal Regolamento ENAC e dal Regolamento UE 2019/947, che definiscono categorie operative, requisiti di abilitazione e aree di volo consentite.
| Parametro | Valore raccomandato |
|---|---|
| Sovrapposizione frontale | 80% minimo |
| Sovrapposizione laterale | 70% minimo |
| GSD (Ground Sample Distance) | 1-3 cm/pixel per survey-grade |
| Quota di volo | 60-120 m AGL secondo contesto |
| Condizioni vento | Sotto i 10 m/s |
Consiglio Pro: Prima di ogni missione, verifica la lista di controllo pre-volo: calibrazione IMU e bussola, carica batterie superiore all’80%, verifica del piano di volo su mappa aggiornata, segnalazione dei GCP con target ad alta visibilità, controllo NOTAM e autorizzazioni vigenti sull’area.
Procedura dettagliata: passo dopo passo nella creazione dell’ortofoto
Individuati gli strumenti, passiamo al cuore operativo: come si crea concretamente un’ortofoto di precisione. Il processo si articola in fasi sequenziali dove ogni errore si amplifica nelle fasi successive.
- Pianificazione della missione. Definisci i confini dell’area di interesse su mappa. Imposta sovrapposizione frontale all’80-85% e laterale al 70-75%. Calcola la quota di volo in base al GSD richiesto dal progetto. Verifica la presenza di ostacoli e zone a rischio.
- Posizionamento dei GCP. Distribuisci i target in modo uniforme sull’intera area, con almeno 5-7 punti per rilievi standard e fino a 15-20 per aree superiori ai 10 ettari. Rileva le coordinate con GNSS NRTK, puntando a un’accuratezza 1 cm GNSS per ogni punto.
- Acquisizione delle immagini. Avvia la missione automatica. Imposta ISO basso (100-200), velocità otturatore adeguata alla velocità di avanzamento per evitare motion blur, e apertura diaframmatica medio-chiusa (f/5.6-f/8) per massimizzare la nitidezza. Per aree con vegetazione o contrasti forti, considera il doppio pattern di volo incrociato (cross-grid).
- Verifica sul campo. Prima di rientrare, controlla un campione di immagini sul display. Verifica nitidezza, esposizione uniforme e assenza di zone non coperte.
- Importazione e allineamento in fotogrammetria. Carica le immagini nel software scelto. Imposta la qualità di allineamento su “alta” o “massima”. Identifica manualmente i GCP nelle immagini e inserisci le coordinate. Un RMSE inferiore a 2 volte il GSD è il valore soglia per accettare il modello, con una densità di nuvola di punti tra 50 e 500 pt/m² in base alla quota di volo.
- Generazione dell’ortofoto e del DSM/DTM. Una volta validato il modello denso, genera l’ortofoto georiferita e il modello digitale di superficie (DSM). Esporta nei formati richiesti dal progetto: GeoTIFF per l’ortofoto, LAS o LAZ per la nuvola di punti.
- Verifica con checkpoint indipendenti. Misura la posizione di punti di controllo non utilizzati come GCP e confronta con le coordinate note. Questo è il controllo di qualità finale.
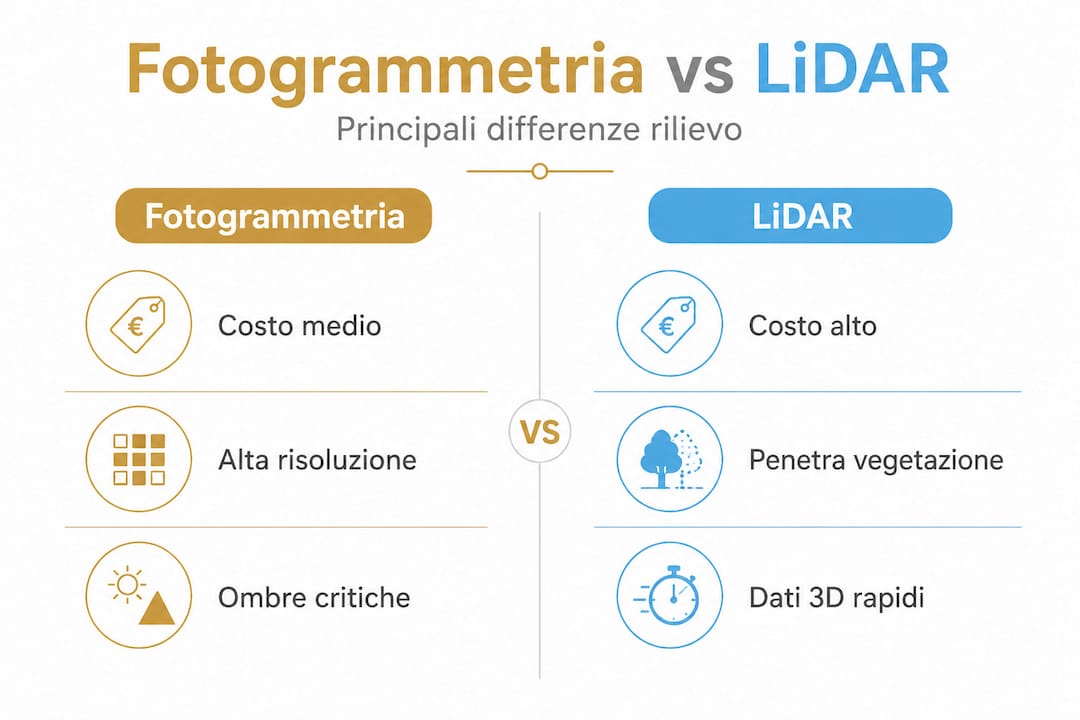
| Aspetto | Fotogrammetria | LiDAR |
|---|---|---|
| Costo strumentazione | Medio | Alto |
| Accuratezza planimetrica | 2-5 cm | 2-5 cm |
| Accuratezza altimetrica | 3-8 cm | 1-3 cm |
| Penetrazione vegetazione | Nulla | Parziale-alta |
| Prodotto principale | Ortofoto + nuvola di punti | Nuvola di punti |
| Tempo di elaborazione | Medio | Medio-alto |
Consiglio Pro: In un confronto pratico tra flusso fotogrammetrico classico e LiDAR su un rilievo forestale, il LiDAR restituisce modelli del terreno reale mentre la fotogrammetria produce modelli della chioma. Per terreni aperti e infrastrutture, la fotogrammetria è spesso la scelta più efficiente. Vedi anche un caso reale su rilievi in contesti complessi, e come il servizio si applica in agricoltura nel monitoraggio di un vigneto con ortofoto annuale.
Errori comuni e come evitarli nella fotogrammetria da drone
Visti i passi operativi, soffermiamoci sugli ostacoli: meglio riconoscerli subito per ottenere ortofoto veramente affidabili.
Sovrapposizione insufficiente
La causa numero uno di buchi nel modello o zone sfocate è una sovrapposizione troppo bassa. Con vento laterale moderato, il drone può deviare dalla traiettoria programmata, riducendo la copertura effettiva. Soluzione: pianifica con margini di sicurezza superiori al 5% rispetto al minimo e verifica le immagini sul campo prima di lasciare l’area.
Errori nella gestione dei GCP
Punti misurati con strumentazione GNSS non corretta, target non visibili nelle immagini o segnalati in modo errato nel software generano deformazioni sistematiche nel modello. Ecco gli errori più frequenti da evitare:
- Misurare i GCP senza rimanere fermi sulla stazione per almeno 60 secondi in modalità RTK fissa
- Posizionare tutti i GCP sulla stessa quota altimetrica, perdendo controllo verticale
- Usare target troppo piccoli rispetto alla risoluzione delle immagini (il target deve coprire almeno 5-10 pixel)
- Dimenticare di inserire l’altezza dell’antenna nel software di rilevamento
- Non identificare abbastanza immagini per ogni GCP (minimo 5-6 foto per punto)
Limiti su vegetazione e ombre
“La fotogrammetria da drone fallisce in presenza di vegetazione densa e zone in ombra profonda, dove non riesce a penetrare la copertura vegetativa. Il LiDAR ha costi maggiori ma garantisce precisione anche in questi scenari critici, come dimostrato da test su aree costiere e forestali dove il metodo ICP applicato post-filtraggio della vegetazione ha restituito RMSE di 4 cm.”
Le ombre generate da edifici alti, filari di alberi o pendii ripidi creano zone prive di texture nelle immagini. Il software di fotogrammetria fatica ad allineare queste aree e produce buchi o artefatti. La soluzione è volare nelle ore con luce bassa e diffusa, oppure integrare i dati con acquisizioni LiDAR per le zone critiche.
L’importanza della documentazione
Ogni rilievo professionale deve essere accompagnato da un report di elaborazione che contenga: impostazioni del volo, numero e distribuzione dei GCP, RMSE sui checkpoint, sistema di riferimento adottato (ad esempio WGS84/UTM32N o il sistema catastale locale) e software utilizzato. Questa documentazione è fondamentale per la tracciabilità e per eventuali contestazioni. I vantaggi per ingegneri e architetti derivano proprio da questo livello di rigore metodologico.
Come valutare la qualità dell’ortofoto finale
Analizzati i possibili errori, chiudiamo il ciclo con la verifica tecnica della qualità dell’ortofoto. Un’ortofoto “bella” non è necessariamente un’ortofoto precisa. Servono metriche oggettive.
I parametri chiave
- RMSE (Root Mean Square Error): misura lo scarto medio tra le posizioni calcolate e quelle note. Per rilievi survey-grade, l’obiettivo è un RMSE inferiore a 4 cm, misurato su checkpoint indipendenti.
- GSD (Ground Sample Distance): è la dimensione reale di un pixel sull’ortofoto. Un GSD di 2 cm/pixel significa che ogni pixel rappresenta 2 cm di terreno. Per pratiche catastali o rilievi strutturali, il GSD deve essere inferiore a 3 cm.
- Densità della nuvola di punti: espressa in punti per metro quadrato, indica la risoluzione del modello tridimensionale. Per analisi volumetriche e DTM (Digital Terrain Model) accurati, si punta a densità superiori a 100 pt/m².
- Ortomosaico senza cucitura: verifica visiva dell’ortofoto in cerca di discontinuità, effetti “fantasma” (ghosting) o zone sfuocate, soprattutto in aree con vegetazione in movimento.
Tabella di riferimento per rilievi survey-grade
| Parametro | Standard minimo | Survey-grade |
|---|---|---|
| RMSE planimetrico | < 10 cm | < 3 cm |
| RMSE altimetrico | < 15 cm | < 5 cm |
| GSD ortofoto | < 5 cm/pixel | < 2 cm/pixel |
| Densità nuvola punti | > 20 pt/m² | > 100 pt/m² |
| Copertura area | 100% | 100% con overlap verificato |
📊 Dato chiave: Nei test condotti su rilievi costieri italiani con sistemi RTK e GCP GNSS NRTK, l’RMSE mediano si attesta intorno a 4 cm in planimetria e 5-6 cm in quota, valori pienamente compatibili con le specifiche survey-grade richieste da direzione lavori e collaudo tecnico-amministrativo.
Come interpretare i report del software: Agisoft Metashape, ad esempio, fornisce automaticamente un report PDF con distribuzione dei GCP, RMSE per ogni punto e mappa di confidenza della ricostruzione. Valori di confidenza bassi (colori scuri nella mappa) segnalano zone critiche che richiedono verifica sul campo o acquisizioni aggiuntive. Approfondire il tema della fotogrammetria aerea innovativa aiuta a capire come queste tecnologie si evolvono continuamente verso standard più elevati.
La prospettiva dell’esperto: ortofoto e oltre
Completato il processo tecnico, guardiamo cosa davvero fa la differenza dal punto di vista di chi opera professionalmente da anni in questo settore.
La tecnologia è necessaria ma non sufficiente. Un drone RTK di ultima generazione in mano a un operatore che non conosce la geometria dei sistemi di riferimento o non sa interpretare un report di elaborazione fotogrammetrica produce dati inaffidabili tanto quanto uno strumento di fascia bassa. La padronanza metodologica, ovvero la capacità di leggere criticamente i dati, riconoscere le anomalie e scegliere la configurazione giusta per ogni contesto, è ciò che separa un risultato buono da un dato davvero utilizzabile.
Molti professionisti sottovalutano il momento della scelta tra fotogrammetria e LiDAR. Il LiDAR non è sempre la soluzione migliore: per rilievi su terreni aperti, strade, piazzali e piccole strutture, la fotogrammetria da drone è altrettanto precisa, più rapida da elaborare e meno costosa. Il LiDAR diventa indispensabile quando si lavora sotto copertura vegetativa densa, su scarpate boscate, argini con canneti o aree forestali. Confondere i due casi porta a spese inutili o, peggio, a dati inadeguati al progetto.
La vera differenza tra un’ortofoto “buona” e un dato utilizzabile in cantiere sta nella tracciabilità e nella coerenza con il sistema di riferimento del progetto. Un’ortofoto proiettata nel sistema sbagliato, anche se geometricamente perfetta, causa disallineamenti gravi quando viene sovrapposta a cartografia esistente o importata in software BIM. Noi di Droinservice, operando su progetti nazionali di infrastrutture, ponti e insediamenti produttivi, abbiamo imparato che il controllo del sistema di riferimento è la prima verifica da fare prima ancora di guardare i valori di RMSE. Per chi lavora su infrastrutture complesse come ponti e viadotti, questo aspetto è critico e spesso trascurato.
Vuoi ortofoto professionali senza margine d’errore?
Da qui, chi è in cerca di garanzia di risultato può accedere a supporto esperto e servizi all’avanguardia.
Affidarsi a un team specializzato significa eliminare le variabili che trasformano un rilievo promettente in un dato inutilizzabile. Droinservice progetta ogni missione fotogrammetrica con pianificazione dettagliata, strumentazione RTK certificata e controllo qualità in ogni fase, dal posizionamento dei GCP alla consegna del report finale.
I nostri servizi professionali con drone coprono ortofoto, modelli 3D, nuvole di punti e rilievi integrati LiDAR per contesti edilizi, infrastrutturali e agricoli su tutto il territorio nazionale. Operiamo con autorizzazione ENAC e metodologie validate sul campo sin dal 2014. Scopri tutte le soluzioni Droinservice o contattaci per un preventivo su misura per il tuo progetto. Per chi gestisce ispezioni su infrastrutture, offriamo anche servizi integrati di monitoraggio strutturale.
Domande frequenti sulla procedura di creazione ortofoto con droni
Qual è l’accuratezza raggiungibile con RTK e GCP nella fotogrammetria con droni?
Con sistemi RTK abbinati a GCP rilevati con GNSS NRTK si raggiunge un’accuratezza empirica di 2-5 cm, pienamente compatibile con le specifiche survey-grade per rilievi tecnici in edilizia e infrastrutture.
Che differenze ci sono tra ortofoto create da fotogrammetria e rilievi LiDAR?
La fotogrammetria è inadeguata su vegetazione densa perché non penetra la copertura, mentre il LiDAR garantisce dati del terreno reale anche in questi casi, a fronte di costi strumentali più elevati.
Come si scelgono e posizionano i Ground Control Points?
I GCP vanno distribuiti uniformemente nell’area di rilievo, evitando zone in ombra, con almeno 5-7 punti per aree standard. La loro accuratezza survey-grade dipende dalla qualità della strumentazione GNSS e dal tempo di stazionamento su ogni punto.
Quali sono i principali errori che invalidano una ortofoto?
Gli errori più frequenti sono sovrapposizione tra scatti inferiore al 70-80%, target GCP troppo piccoli o mal posizionati, e mancata verifica con checkpoint indipendenti dopo l’elaborazione.
Come si verifica la qualità di una ortofoto ottenuta da drone?
Si controllano RMSE su checkpoint indipendenti, GSD dell’ortofoto e densità della nuvola di punti, confrontandoli con i valori survey-grade di riferimento come RMSE inferiore a 4 cm e GSD inferiore a 2 cm/pixel.
Raccomandazione
- Rilievi con droni e il mercato: fattori di crescita e opportunità
- Blackmagic Micro Cinema Camera // New entry Droinservice
- Riprese aeree con Droni a Il Borgo | Gubbio – Droinservice
- Droni: chiarimenti da parte di Enac – Droinservice
- On board camera voor RC vliegtuig, drone cam – KUUS.



